

 Scholarly Knowledge Mining
Scholarly Knowledge Mining
 Digital Humanities
Digital Humanities
 Data Science
Data Science
 Smart Cities and Robotics
Smart Cities and Robotics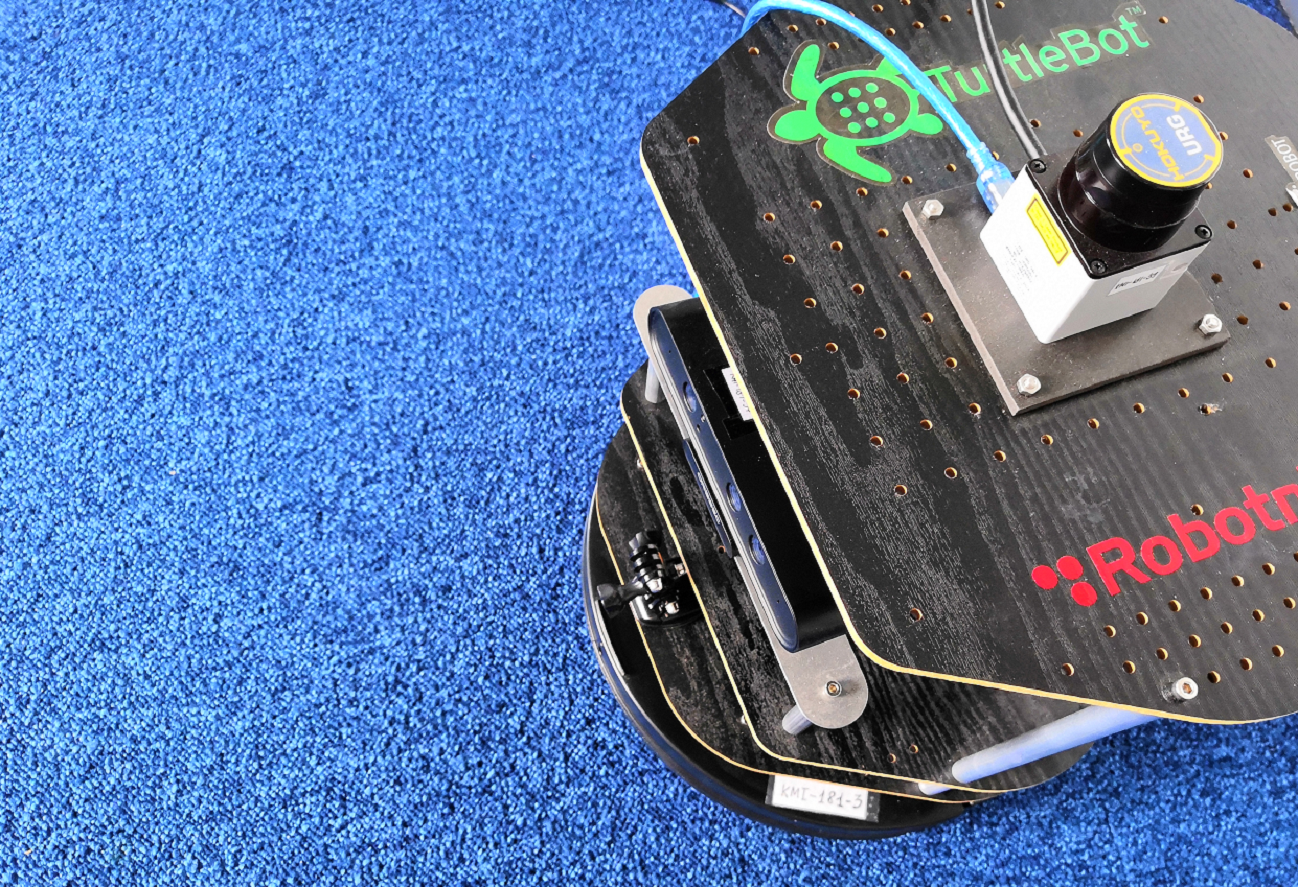
In this video, the Health & Safety robot inspector under development at ISDS, which is called HanS, is navigating KMi searching for a set of relevant everyday objects. The robot’s location on the map can be followed on the top-right display. Its predictions of the object classes and locations (i.e., the rectangular bounding boxes enclosing each identified object) are shown on the bottom-right screen. The rectangles are annotated with predictions from both the object recognition module developed in our Lab (first label from the left) and YOLO, one of the state-of-the-art methods for real-time object recognition.
HanS’ ability to spot the presence of relevant objects in a noisy, real-world environment is a crucial pre-requisite for autonomous sense-making. For instance, by learning to recognise that a pile of paper is sitting right next to an electrical appliance, and by combining this evidence with additional background knowledge about these objects (e.g., “paper is flammable” and “electric appliance is a potential ignition source”), HanS is then able to identify a potential fire hazard.