

 Scholarly Knowledge Mining
Scholarly Knowledge Mining
 Digital Humanities
Digital Humanities
 Data Science
Data Science
 Smart Cities and Robotics
Smart Cities and Robotics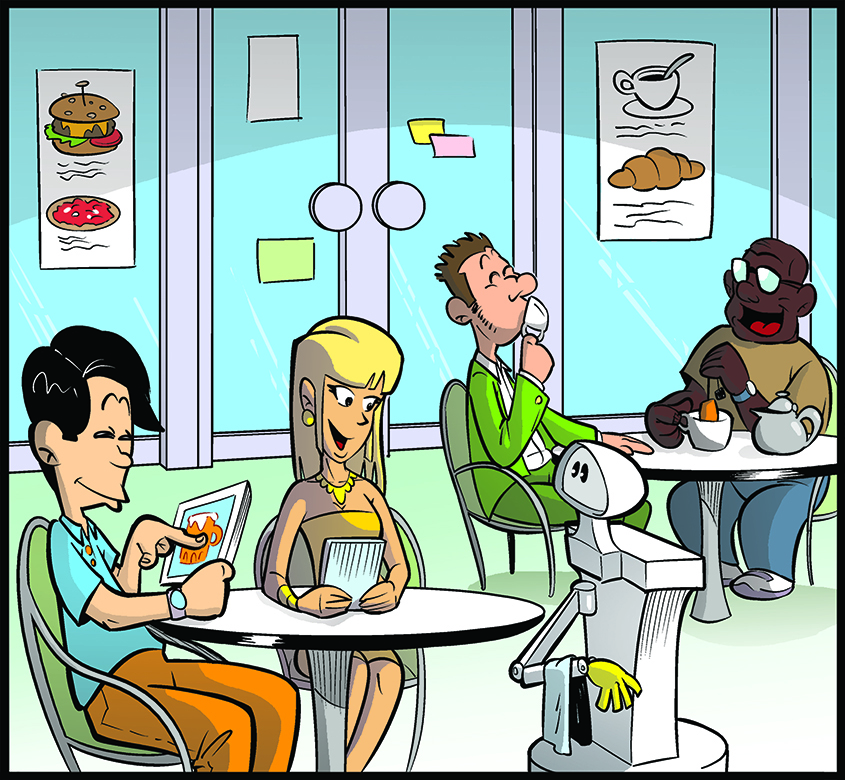
This episode will be part of the 2021 competition. For a detailed and up to date description please refer to the official rule book (to be released in April).
General Description.
In this episode the robot will assist the staff of a coffee shop to take care of their customers. The robot is required to recognise and report the status of all tables inside the shop, to take orders from customers and to deliver objects to and from the customers’ tables.
The main functionalities that are evaluated in this episode are people perception and object perception. Moreover, in connection with Episode 2 we will address also the interaction through sign language. The latter will be considered as an option that would have an impact on the score, but is not mandatory. It is worth mentioning that the robot should have other functionalities (although not explicitly targeted in the score) including navigation, speech synthesis, spoken language.
This episode can be entered in a Gazebo simulator modality or with actual robots. Moreover, the teams will be allowed to participate in the competition both remotely and onsite. Notice that remote participation is possible also on real robots, since a TIAGO robot will be available to run the code provided by remote participants.
The sign language component is not available in the simulated scenario, but it will be included on the real robot version, as an option to increase the overall score.
Notes:
1) No manipulation actions are required, the objects are placed and gathered by people to and from the tray on the robot.
2) Objects to deliver are such that they will fit on the robot tray.
Simulation Version
The goal of the simulation environment is to allow for the development of the whole architecture, main functionalities as Person and Object perception are simplified by the simulation set up. Other functionalities needed are navigation and, optionally, Spoken Language to interact with customers. In the case of Spoken Language the Spoken Language interpretation is up to the team, while the text-to-speech is provided by the TIAGO voice.
The simulation environment can be regarded as a starting basis for the the development of the real robot system.
Platform.
The simulation environment will be in Gazebo, where a model of the TIAGO robot and a model of the coffee shop environment are available. The robot is equipped with a tray for transporting a few small objects, and sensors for people/object perception and navigation in the virtual environment. All the sensors available on the TIAGO are accessible in the simulation environment (except for the microphone, which is handled through the computer microphone).
Set up.
A virtual coffee shop (e.g. 5 meters * 9 meters), with a few tables and typical objects (e.g. coffee cups, napkins, …) will be made available resembling the real competition arena to be made available in Bologna. The environment will consist of people waiting to be served, customers already served, tables that need to be cleaned, and empty tables ready to receive new customers (see Fig. 1 Coffee Shop Scenario in Gazebo).
<img data-attachment-id="1270" data-permalink="https://sciroc.org/e01-coffee-shop/fig-1/" data-orig-file="https://isds.kmi.open.ac.uk/isds-data/uploads/2021/03/e01-coffee-shop-5.jpg" data-orig-size="663,374" data-comments-opened="0" data-image-meta="{"aperture":"0","credit":"Sarah Carter","camera":"","caption":"","created_timestamp":"1616670405","copyright":"","focal_length":"0","iso":"0","shutter_speed":"0","title":"","orientation":"0"}" data-image-title="Fig.1. Coffee Shop Scenario in Gazebo (episode 1)" data-image-description="
This image displays how the simulated coffee shop scenario will look for Episode 1 in Gazebo.
” data-medium-file=”https://isds.kmi.open.ac.uk/isds-data/uploads/2021/03/e01-coffee-shop-1.jpg” data-large-file=”https://isds.kmi.open.ac.uk/isds-data/uploads/2021/03/e01-coffee-shop-5.jpg” loading=”lazy” class=”aligncenter wp-image-1270 size-medium” src=”https://isds.kmi.open.ac.uk/isds-data/uploads/2021/03/e01-coffee-shop-1.jpg” alt=”Simulated coffee shop scenario for Episode 1 in Gazebo.” width=”300″ height=”169″ srcset=”https://isds.kmi.open.ac.uk/isds-data/uploads/2021/03/e01-coffee-shop-1.jpg 300w, https://isds.kmi.open.ac.uk/isds-data/uploads/2021/03/e01-coffee-shop-5.jpg 663w” sizes=”(max-width: 300px) 100vw, 300px”>
Procedure.
The robot is placed in a starting location near the counter and the trial begins. The robot will need to navigate around the shop and assess the status of all tables. If a table is clean but with customers present at the table, the robot will accept an order from that table and will report it to the kitchen. The interaction with customers can be via written text (or via spoken language with a higher score).
The robot will then navigate to the counter to collect and deliver the objects to that table. The robot does not require manipulation. Hence the object will be taken by the customers from the robot tray. The order provided by the counter will have one of the items missing or incorrect and the robot must identify and correct the mistake. A run terminates when the robot has delivered the order to the table. A time limit will conclude the episode if the robot gets stuck.
Scoring.
Evaluation of the performance of a robot is based on the concept of performance classes employed in the ERL competitions. The performance class of a robot is determined by the number of achievements (or goals) that the robot collects during its execution of the assigned task. Within each class, ranking is defined according to the number of penalties collected by the robots belonging to the class. Examples of Achievements and Penalties for this episode is as follows:
Achievements.
- The robot correctly reports all the tables that need serving.
- The robot correctly reports the status of all the tables.
- The robot correctly reports the number of customers at every table.
- The robot reaches an unserved table and asks the order.
- The robot correctly understands and communicates the order of the customer to the counter.
- The robot correctly recognises the wrong or missing item and requests correction of the order.
- The robot delivers the order to the right table.
Penalising behaviours.
- The robot hits any of the furniture or objects (one penalty for each hit).
- The robot requires multiple repetition of the speech command / The robot requires multiple repetition of a customer speech act.
Disqualifying behaviours.
- The robot hits a human.
Real Robot Version
The real robot version of the episode will require all the functionalities as specified in the general description.
Platform.
A mobile service robot that is equipped with a tray, a planar surface or any other way of transporting a few small objects is required. The robot must be equipped with sensors for people/object perception and navigation. The optional human-robot interaction based on sign language will require 1 arm and a hand.
A TIAGO robot will be provided on site to support remote participation of teams without a robot. The remote participation will be implemented through the delivery of a docker that will be installed and run on site. Details on the actual procedure will be provided in the full rule book.
<img data-attachment-id="1271" data-permalink="https://sciroc.org/e01-coffee-shop/fig-2/" data-orig-file="https://isds.kmi.open.ac.uk/isds-data/uploads/2021/03/e01-coffee-shop-6.jpg" data-orig-size="590,374" data-comments-opened="0" data-image-meta="{"aperture":"0","credit":"Sarah Carter","camera":"","caption":"","created_timestamp":"1616670429","copyright":"","focal_length":"0","iso":"0","shutter_speed":"0","title":"","orientation":"0"}" data-image-title="Fig. 2 One Arm TIAGO Robot with the detail of the hey5 hand" data-image-description="
One Arm TIAGO Robot with the detail of the hey5 hand
” data-medium-file=”https://isds.kmi.open.ac.uk/isds-data/uploads/2021/03/e01-coffee-shop-2.jpg” data-large-file=”https://isds.kmi.open.ac.uk/isds-data/uploads/2021/03/e01-coffee-shop-6.jpg” loading=”lazy” class=”aligncenter wp-image-1271 size-medium” src=”https://isds.kmi.open.ac.uk/isds-data/uploads/2021/03/e01-coffee-shop-2.jpg” alt=”One Arm TIAGO Robot with the detail of the hey5 hand” width=”300″ height=”190″ srcset=”https://isds.kmi.open.ac.uk/isds-data/uploads/2021/03/e01-coffee-shop-2.jpg 300w, https://isds.kmi.open.ac.uk/isds-data/uploads/2021/03/e01-coffee-shop-6.jpg 590w” sizes=”(max-width: 300px) 100vw, 300px”>
Set up.
A coffee shop like arena (e.g. 5 meters * 9 meters), with a few tables and typical objects (e.g. coffee cups, napkins, …) will be made available. Objects will be a fixed set, to be disclosed only at the competition site.
The environment will be populated by a set of people waiting to be served, customers already served, tables that need to be cleaned, and some cleaned tables, empty tables ready for new customers.
Deaf-mute customers will be present for the teams that implement the sign language option.
Procedure.
The robot is placed in a starting location near the counter and the trial begins. The robot is required to navigate around the shop and assess the status of all the tables. If a table is clean, but with customers present at the table, the robot will accept an order from that table and will report it to the counter. The interaction with customers can be via spoken language or through sign language for deaf people (with a higher score).
The robot will then navigate to the counter to collect and remember the order and will deliver the objects to that table. The order provided by the counter will have one of the items missing or incorrect and the robot must identify and correct the mistake.
Scoring.
Evaluation of the performance of a robot is based on the concept of performance classes employed in the ERL competitions. The performance class of a robot is determined by the number of achievements (or goals) that the robot collects during its execution of the assigned task. Within each class, ranking is defined according to the number of penalties collected by the robots belonging to the class. Examples of Achievements and Penalties for this episode is as follows:
Achievements.
- The robot correctly reports all the tables that need serving.
- The robot correctly reports the status of all the tables.
- The robot correctly reports the number of customers for all tables with customers.
- The robot reaches an unserved table and asks for the order.
- The robot uses sign language to greet and take the order of a deaf-mute person
- The robot correctly understands and informs the order of the customer to the counter.
- The robot correctly understands and informs the order of the deaf-mute customer to the counter.
- The robot correctly recognises the wrong or missing item and corrects the order.
- The robot delivers the order to the right table.
Penalising behaviours.
- The robot requires multiple repetition of the speech command / The robot requires multiple repetition of the sign language from deaf person.
- The robot hits any of the furniture or objects (one penalty for each hit).
Disqualifying behaviours.
- The robot hits a human.
- The robot damages the furniture and/or objects.