

 Scholarly Knowledge Mining
Scholarly Knowledge Mining
 Digital Humanities
Digital Humanities
 Data Science
Data Science
 Smart Cities and Robotics
Smart Cities and Robotics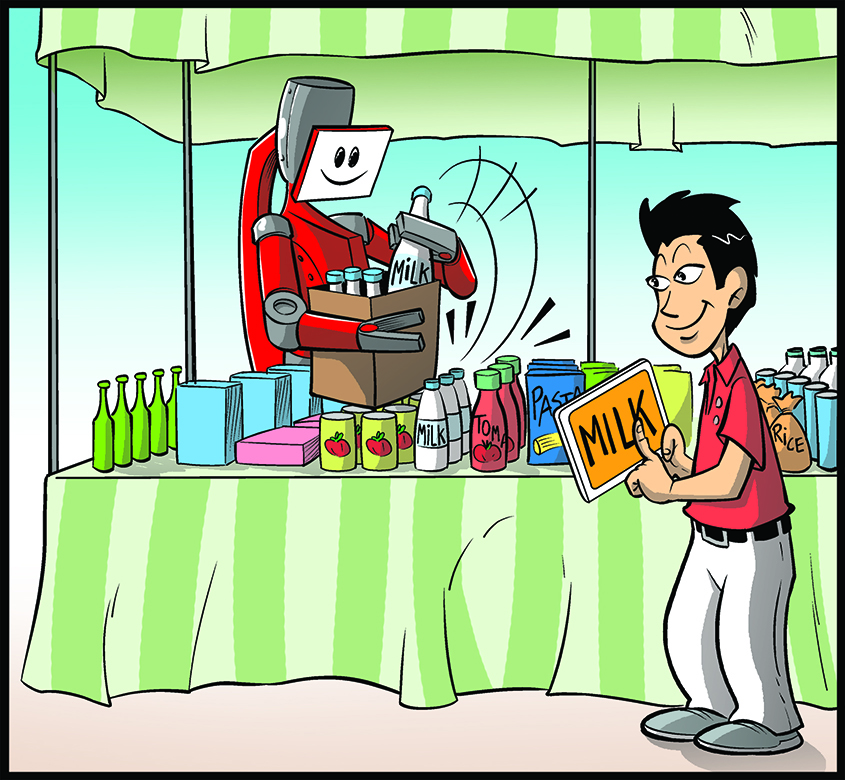
This episode will be part of the 2021 competition. For a detailed and up to date description please refer to the official rule book (to be released in April).
General Description.
This episode addresses the problem of picking products from a storage container and placing them on a designated shelf. The chosen domain is the operation of an autonomous shop, where the robot helps to manage the inventory of a shop and to organise newly arrived products.
Platforms allowed.
Tasks must be completed using a fully autonomous robotic platform with mobile manipulation and perception capabilities (e.g. KUKA YouBot, TIAGO, etc.). In particular, the robot must be able to navigate autonomously in the environment to reach the products inside a storage container or to place items on a shelf. In addition, the robot must be able to detect, grasp and manipulate products in order to deliver them to the designated location. Moreover, the robot should be easily moved in and out of the competition zone, even when not in function, by maximum two team members with minimum effort.
Set up.
The episode takes place in an area reproducing a grocery shop. The shop is built with a picking area with a storage container and shelves where products need to be placed.
Procedure.
The episode will include one container that will be placed on a fixed location. The Container will contain all the objects that need to be stacked on the shelf. The robot has to pick objects one-by-one from the container and place them on the shelf. A product is considered as delivered only when it is placed on the designated shelf without being in contact with any part of the robot, and the robot has announced its delivery.
Contingency plan for remote competition.
In case of a travel ban, the competition will be conducted in remote setup with teams executing the competition in their labs and live streaming the video. The organisers will ship the arena components and the objects to the individual teams. The shelf used for placing the objects will be replaced with additional storage containers. The episode will be modified to pick from one container and place in another container as per the category.